Robot sensör ve PLC Haberleşme örneği
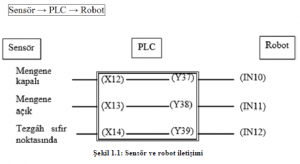
Uygulama faaliyetinde kullanılacak sensör, PLC programı ile robota ait giriş ve çıkışlar aşağıda gösterilmiştir.
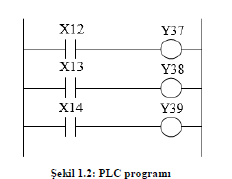
Yukarıdaki PLC programı şu şekilde açıklanabilir:
Mengene kapalı olduğu zaman PLC’nin X 12 girişine bağlı olan mengene üzerinde sensörden kapalı sinyali gelir. Bu sinyal robota, robotun IN 10 girişine bağlı olan PLC’nin Y37 çıkışı ile bildirilir. Kapalı sinyali PLC’ye gittiği sürece robot mengeneye iş parçası taşımaz ve iş parçasını mengeneden almaya kalkmaz.
Mengene açık olduğu zaman PLC’nin X 13 girişine bağlı olan mengene üzerinde sensörden açık sinyali gelir. Bu sinyal robota, robotun IN 11 girişine bağlı olan PLC’nin Y38 çıkışı ile bildirilir. Açık sinyali PLC’ye gittiği sürece robot iş parçasını mengene üzerine koysa bile robot el açılmaz.
CNC freze tezgâhının tablası tezgâh sıfır noktasında olduğu zaman PLC’nin X 14 girişine bağlı olan mengene üzerinde sensörden açık sinyali gelir. Bu sinyal robota, robotun IN 12 girişine bağlı olan PLC’nin Y 39 çıkışı ile bildirilir. Bu sinyal PLC’ye gelmediği sürece CNC tezgâhında iş bitmemiş demektir ve robot iş parçasını mengeneden almak için hareket etmez.
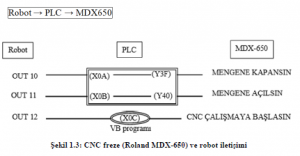
Robot, iş parçasını mengene yerleştirdiği zaman robotun OUT 10 çıkışı üzerinden sinyal gönderir. Bu sinyal PLC’nin X 0A girişini aktif hâle getirir ve PLC’nin Y3F çıkışına sinyal gider. Bu sinyal, mengeneyi kapatacak olan selenoid valfi çalıştırır ve mengene kapanır.
Robot, iş parçasını mengeneden almaya gidip parçayı eli ile tuttuğu zaman robotun OUT 11 çıkışı üzerinden sinyal gönderir. Bu sinyal PLC’nin X 0B girişini aktif hâle getirir ve PLC’nin Y 40 çıkışına sinyal gider. Bu sinyal mengeneyi açacak olan selenoid valfi çalıştırır ve mengene açılır.
PLC’nin X 0C girişine robotun OUT 11 çıkışından sinyal geldiği an Visual Basic programında bulunan G kodları CNC freze tezgâhına aktarılır ve tezgâh iş parçasını işlemeye başlar.
CNC tezgâhları, PLC’ye, bilgisayara sinyal ve veri gönderemez. Bu olumsuz durum, tezgâhın başlangıç (home) pozisyonuna gönderilerek buradaki kontağın (X1) açılıp kapanmasıyla çözülür.