Hoverboard ( Gezinme aparatı ) nedir ve nasıl çalışır?

Daha hızlı ve daha basit ulaşım arayışımız her zaman bir Yolculuk olacak ve bir hedef olmayacak. Bir birey için aranan ve aranan modlardan biri Hoverboard’tur. Pilleri çalıştıran kendi kendini kontrol eden iki tekerlidirler (Çoğu, çoğu). Bu dumbell benzeri Hover panoları ilk kez 1989’da “Back to the Future” da yer aldı ancak birkaç yıl önce ortaya çıktılar ve popülerleşti. Bugün kullanılan Hoverboard’lar “Hover” yapamaz olsa da, çeşitli sensörlerin kullanımını anlama konusunda çok ilginç. Bunlara Self-Balancing Scooter denir .
Çalışmaya başlamadan önce, önce 9 eksenli sensör hakkında bilgi edelim . Bunlar Accelerometer, Jyroscope ve Magnetometer; Her üç sensörün de her biri 3 eksenlidir.
İvme ölçer kullanılır:
Değişken kapasitans kullanarak Doğrusal 3 boyutlarda (Kartezyen Koordinatlar) konumlar. Burada, kapasitör plakalarından birinin sabit tutulduğu ve diğerinin konumunu değiştirmesine izin verilen her boyut için kapasitörlerimiz var (Konum değişimine karşı çok hassastır). Bu plakalar arasındaki mesafedeki değişim, kapasitans değişikliğine, dolayısıyla voltaja neden olur ve bu da gerektiğinde izleyebileceğimiz ve kullanabileceğimiz niceliksel bir değer verir.
Jiroskop vardır :
Bu, en önemli bileşen, o kadar ki bu araç için diğer ad ‘Gyro scooter’. Jiroskop temel olarak, cıvar içinde kütlenin kaymasıyla açısal değişimi ölçer. Mekanik bir jiroskop, merkezinde bir rotor bulunan konsantrik metal jantlardan oluşurken, bir elektronik jiroskop bu uygulamayı da içeren birçok uygulama için kullanılırken biraz farklıdır. Coriolis Effect’i kullanır: bir kütle belirli bir hızda belirli bir yönde hareket ettiğinde ve ekseni hareketle dikeyken harici bir açısal hız uygulandığında, her ikisine de dikey olarak yer değiştirecek bir Coriolis kuvveti oluşur kitle. Bu deplasman Kapasitenin değişmesine ve dolayısıyla Voltajın bize belirli bir açısal hızla orantılı olarak ölçülebilir bir değer vermesine neden olacaktır.
manyetometre:
Hall Etkisi prensibi kullanılarak yeryüzünün manyetik alanına göre manyetik alanı ölçer. Buna rağmen, kendi Hoverboard’ınızı oluşturmak için bu bileşenleri aşağıda yer alan bileşen listemize eklemedik.
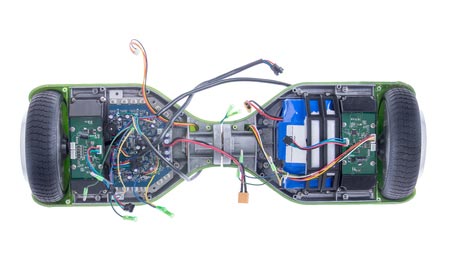
Hoverboard oluşturmak için Gerekli Bileşenler:
Kendi Hoverboard’ınızı kurmayı planlıyorsanız, en önemli ve minimum gerekli bileşenleri şunlardır:
- İki tekerlekli,
- İki Motor, İki IR Sensörü,
- İki Gyroscope,
- İki eğim / hız sensörü,
- Bir Mantık Komitesi,
- Bir Pil takımı,
- Bir Güç Anahtarı,
- Plastik Bir Kabuk ve
- Merkezi Pivotlu güçlü bir Çerçeve (tercihen çelik),
- Şarj portu (tavsiye edilmezse, her zaman harici şarj gerekmez)
Hoverboard nasıl çalışır?
Hoverboard’lar, tekerleklerin her biri kendi Gyroscope, Tilt ve hız sensörlerine sahip olacak şekilde tasarlanmıştır . Genellikle binicinin ayağı yerleştirdiği çerçeve altına yerleştirilirler. Sürücü ayakları tahtaya yerleştirdiğinde, Cayroskop, binici öne veya arkaya eğildiğinde mantık tahtasına veri sağlar. Sürücü eğilmiyorsa, Ayak yerleştirmesinin altında konumlanan IR sensörü, mantık tahtasına hareket etmemek ve motoru çalıştırmamak için veri verir. Ayak pedleri üzerindeki baskıyı bu şekilde hissettiklerini ve bu kendinden dengeli scooterları buna göre hareket ettirdiklerini.
Belirli bir yönde belirli bir yönde (ileri veya geri, Hover tahtasına bağlı olarak) belirli bir açıyla eğildiğinde , jiroskoptan gelen veriler motorun çalışması için mantık tahtasına yönlendirilir ve tekerleklerin döndürülmesine ve sürücünün ilerlemesine izin verir . Daha fazla eğim daha fazla hız kazandıracaktır.
Her jant, dönüş yapmak için kendi jiroskopuyla uyumludur. Sol dönüş için binici sağdaki tekerleği hareket ettirerek sağdaki tekerleği hareket ettirecek ve sol tekerleğin motorunu kapalı tutacak ve sola dönecektir. Benzer şekilde sağa dönüş için sol ayaklar eğilme için ileriye doğru hareket ettirilmelidir. Çevreler içinde hareket edebilmek için, önümüzdeki herkesi yatırın. Çok üretken değil ama eğlenceli J
IR Sensörleri , birçok uygulamada kullanılabilen sensörden varlığını ve uzaklığını ölçmek için nesneden yansıtılan verilerin alınması için Kızılötesi ışınlar kullanan çok yaygın sensörlerdir.
Eğim ve hız sensörleri rpm’de (Dakikadaki devir sayısı) hareket eden tekerleklerin hızını ölçer ve hızı denetlemek için verileri jiroskop ve mantık panosuna gönderir.
Mantık Kurulu Vurgusu Kurulu Merkezi İşlem Birimi gibidir. Bu Mantık tahtası, ana bileşen olarak Mikroişlemci’ye sahiptir . Tüm sensörlerden veri gönderir ve alır, mantıksal olarak işlenmiş veriyi, dengeli ve merkezli bir araç olan sürekli ayarlar sağlayan gerekli hareketler için motorlara gönderir. Ayrıca pillerin gücünü de yönetir ve yanmadığına da dikkat eder.
Pil takımları hazırdır ve bu bileşen için çeşitli seçenekler mevcuttur, ancak bu uygulama için en çok kullanılan pil 36V 4400mAH’lık bir pildir. Eski bir dizüstü bilgisayarın pilini kullanarak kendi pil takımınızı da oluşturabilirsiniz (her ne kadar çok dikkatli davranmanız gerektiği için önerilmez!)

Elle tutmalı gezinme aracı Özellikleri:
Bunlar genellikle tam şarjda 15-20KM’lik ve maksimum hız 11-12KM / Hr olan pürüzsüz yollara gider. Sıfırdan Tam şarj süresi yaklaşık 2 saat, 90-95 KG ağırlığa kadar taşıyabilir ve fiyatı 200 USD – 300 USD arasındadır.
Eğer varsa bir tane satın almayı düşündüğünüz , olanları sahip Kaliteli olanlar için bakın …
- Tekerleklerin üzerinde daha iyi kenarlar, çünkü ayakta durmak için ayaklarınızı janta doğru itmek onları sabit tutmak için yararlı olacaktır.
- Pilin zayıf yalıtım nedeniyle patladığı birkaç durum olduğu için daha iyi pil kalitesi, bu nedenle aşırı şarj için herhangi bir koruma sağlamadığı için pilin güvenlik standartlarını iyice kontrol edin
- Daha iyi bir yazılım ve mantık programı böylece sensörlerin eksiksiz kullanılmasını sağlayabilir ve kendiniz için doğru bir cihaza sahip olursunuz. Özellikle gecikmeli sorun olup olmadığını kontrol edin, çünkü en iyi sonuca ulaşmak için tüm veri akışı işlemi keskin gerçek zamanlı olmalıdır.
- Büyük tekerlekler, büyük tekerlekler onları taşımak için daha fazla tork ve güç gerekir. Ayrıca, çok küçük olmamalı veya ağırlığı taşıyamayacakları gibi düşük hız ve güç yönetimi ile sonuçlanacaklardır
Onlardan seçim yapabileceğiniz birçok marka var ancak her zaman evde kendiniz yapabileceğiniz gibi özelliklerini arzunuza göre ayarlayabilirsiniz : Yolunuzu aydınlatmak için sis lambaları eklenebilir, LED’ler size tümüyle yeşil renk gibi belirli verileri gösterebilir, iyi bir veri akışı ve Herhangi bir sensör veya kart düzgün çalışmıyorsa kırmızı olur ve kurulun yeniden başlatılması gerekir, Süspansiyonlar eklenebilir ve aynı zamanda pil kalitesi artabilir.
Kendini Dengeleyen Gezinme araçlarına Eğilim:
Hover panolarının eğilimi, yalnızca teknolojiden ötürü gerçek olmasını sağlamak için kurgusal bir ulaşım modeli olarak gösterildiğinden beri başladı. Bir şöhret İfadesi olarak başlayınca, şimdi sokaklara ve sıradan evlere ana akımına ulaştı. Birkaç yıl sonra kullanımda ve talep halinde; O günden bu yana satışlarında bir zorunluluk haline gelen birçok konu ile karşı karşıya kaldı. Yönetim kuruluna binmekten kaynaklanan yaralanmalar bildirildi; bunların çiftinin patlaması sonucu güvensiz ilan edildi ve bunları yasaklama fikri rapor edildi ve eğilim düşüş eğilimine girdi. Bütün bu sorunlarla yüzleştikten ve küllerden geri döndükten sonra, Bu Kendini Dengelenen Scooterşimdi piyasada mevcuttur. Eskiden olduğu gibi talep halinde değil, ama orada ve çocuklar ve gençler arasında popüler. Kısa mesafelerle seyahat etmek ve serin durmak isteyen insanlar (özellikle işçi sınıfı) için ideal olan Hover panoları başarıyla yeniden ortaya çıkmış ve daha uzun zamandır ortak bir aracın yanında kalmayı vaat ediyor.